定位功能主要应用于加工设备工具端的路径引导;物流标签读取和字符识别是识别功能最直接的服务对象;测量功能主要应用于对目标物体的高速 高精测量
沂南网格化App是沂南县社会治理信息平台的手机应用,可以为食品药品监管搭建新模式,调动业委会,物业公司,小区网格员,街巷网格员等参与食品药品安全治理
PLC控制器用于圆周运动或直线运动的控制;嵌入式控制器涵盖从简单到复杂的各种运用;网络式控制器与伺服驱动 统的链接是采用各类工业总线形式
中国机器视觉技术在工业领域应用较多,产业分布与中国制 造业发达地区的地理位置联系较紧密,在广东省、江浙沪等 地区较集中,诞生了多个中国机器视觉产业链上中游龙头企业
与RV及其他精密减速器相 比,谐波减速器使用的材料,体积及 重量大幅度下降;精度往往不及谐波减速器,一般应用于多关节机器人中机座
谐波减速器是一种靠波发生器使柔轮产生可控的弹性变形波,器具有单级传动比大,体积小,质量小,运动精度高等特征;RV减速器是是旋转矢量(Rotary Vector)减速器的简称
人形机器人的机械构造复杂程度都远高于现有的机器人,根据各部位运动需求构建执行精度高的驱动系统开发具有高度稳定性和适应性的控制系统
一种用于机械臂的末端连杆装置,包括末端连杆主体,末端连杆主体设置在机械臂的输出端;至少一个握持部,握持部能够被握持,与末端连杆主体一体地形成
SLAM是即时定位与地图构建,主要用于解决机器人在 实际环境中的定位与运动导航问题;云平台为机器人提供更大的信息存储空间和 超强的计算能力
芯片主要负责机器人作业的数据计算和指令下达;控制器主要负责发布和传递动作指令;伺服舵机主要用于驱动机器人的关节;减速器主要安装在机器人关节处
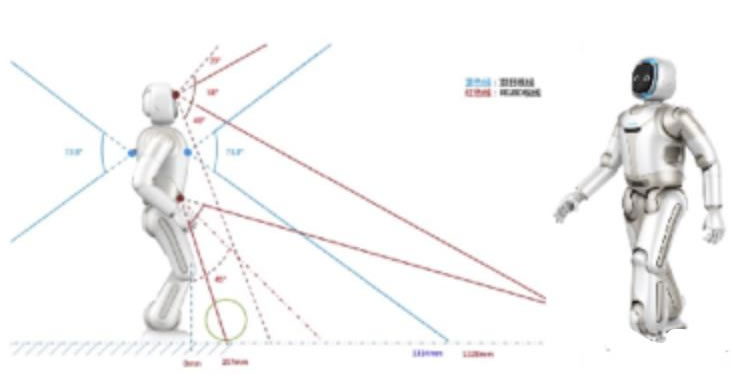
传感器是机器人具有类人知觉与反应能力的基础,可分为用于测量智能机器人自身状态的内部传感器和用于测量与机器人作业相关的外部因素的外部传感器
可使用半导体器件或将符合欧姆定律的电阻性元件封装在半导体器件管壳内制成的发热元件作为热源,避免半导体器件的导通角对功率计算的影响