
| 摩登7机器人 |
| CHUANGZE ROBOT |
Skoltech的研究人员设计了一种新的方法,用于受伤或中风后的腿部康复,该方法使用脑-机接口,并通过皮肤对脊柱进行电刺激。该方案结合了虚拟现实技术,通过重新建立运动和意图之间的联系,瘫痪患者能够重新控制下肢并掌握自然运动。
1 研究背景
全世界数百万人因脊髓损伤和中风而出现感觉、运动或认知功能障碍。神经系统的恢复有许多限制,使大多数传统的医疗方法无效。神经接口和神经刺激技术等新的神经技术可能会彻底改变神经疾病的康复程序。该研究提出了一种新的方法来康复由中风或脊髓损伤引起的下肢损伤,并且开发了一个带有BCI系统和独特机器人助手的虚拟环境。研究人员通过临床试验展示康复方法的工作原型。
2 研究内容
研究方案:
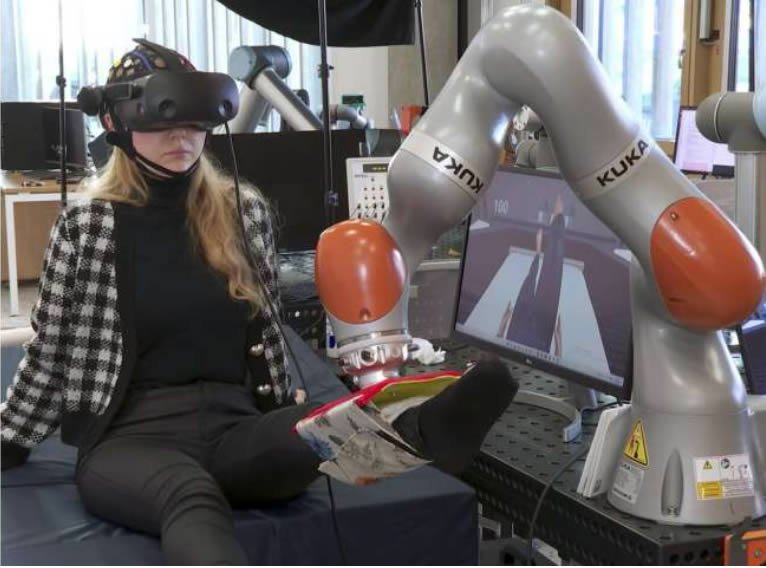
中风后的患者,以及在某种程度上经历过脊髓创伤的患者经常需要进行康复训练,试图重新连接大脑中移动患肢的意图和实际的肌肉运动。该研究团队设计了一个集以下所有功能于一身的训练系统:一个虚拟现实耳机,它能促使患者朝着虚拟目标发起腿部运动,并产生独立运动的错觉;一个神经接口,它能记录患者的运动意图;一个机器人,由于摩登7自己的软件,它能以自然的方式移动腿部和脊髓的经皮电刺激,粗略地说,这会放大来自大脑的信号。
1、脑机接口:神经接口是连接到神经系统、读取和解码其活动并向外部辅助设备输出信号的设备,如外骨骼和假肢,在瘫痪时恢复活动能力。大脑的可塑性在神经再生中起着关键作用。神经接口可用于协调与尝试启动自主运动相关的神经元活动和由辅助设备工作产生的传入信号。研究人员设计了一个虚拟环境,要求人们预测瘫痪腿在目标瓷砖方向上的运动。脑电图(EEG)在医用级NVX-36放大器中注册。BCI采用P300范式。
2、机器人辅助治疗:下肢损伤的标准康复方案依赖于医生进行的物理治疗练习。这种方法不允许BCI和腿部运动同步。研究人员开发了一种特殊的机器人,可以模仿自然行走模式移动患者的腿。KUKA LBR iiwa 14 R820(KUKA LBR-iiwa)机器人手臂使用KUKA的Sunrise Workbench平台及其Java API编程。该机器与人-机器人协作兼容,可以安全地用于人类康复过程。KUKA LBR iiwa有七个轴,每个关节都配有扭矩传感器和位置传感器。除了机器人手臂的位置控制之外,传感器数据还允许阻抗控制。高精度的传感器数据和高达1kHz的更新频率使机器人能够对处理力做出快速反应,并使其适合与人类交互。
3、经皮脊髓电刺激:经皮脊髓电刺激已在许多先前的研究中显示出较好的治疗结果。tSCS是通过将电极定位在椎骨T11-T12的棘突之间、阳极(位于髂骨顶部上方)、频率为30 Hz的双极或单极脉冲(以5 Hz的频率调制)来执行的。该刺激与机器人助手进行的腿的运动同步施加。
训练程序:康复训练期间,患者躺在床上,瘫痪的腿被放在KUKA LBR iiwa的支架上。患者使用虚拟现实耳机,并在虚拟现实中进行跨步练习。脑电正在被记录和解码以用于BCI应用。在虚拟现实中患者观察到自己站在一块有六块不同瓷砖的地板前,要求患者踩其中一个。为了进行运动,指导患者将注意力集中在所需的瓷砖上并想象运动。一旦BCI检测到患者的意图,机器人就会启动运动程序。在虚拟现实中,患者在没有机器人辅助的情况下观察他的腿在移动,此时应用tSCS,同步启动与自主运动相关的神经元活动和辅助设备工作产生的传入信号。
4 研究结论
本研究提出了一种新的下肢康复训练方法,开发了一种由BCI控制、促进瘫痪腿运动的机器人辅助器具。该系统能够同步与启动自主运动的尝试相关联的神经元活动和由辅助装置的动作产生的传入信号。为了在这种锻炼期间支持神经康复,应用经皮脊髓电刺激。多种技术的结合有望成为恢复中风或脊髓损伤导致的下肢损伤的有效方法。
 |
| 智能服务机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 导览机器人 |
