
| 摩登7机器人 |
| CHUANGZE ROBOT |
众所周知,力量反馈有助于外科医生使用适当的力度来避免组织损伤,而组织损伤通常是由于触觉反馈的丧失和无意的过大器械力的副产物[5]。例如,达芬奇手术系统(Intuitive Surgical Inc.,Sunnyvale, CA)是迄今为止D一个手术机器人,也是商业上成功的手术机器人之一,但它不提供力或触觉反馈。据报道,在达芬奇机器人操作的手术中,抓握力将通过力反馈显著降低[2]。利用传感器测量触觉信号可以通过增加外科医生的处境意识来提G手术效率[2],特别是对于G风险的手术来说,如心脏和大脑手术[6]。这种触觉传感器应满足特定的物理和功能要求。比如,像手术钳和镊子这样的手术器械都有很小的下颌。因此,传感器应小型化,以适合理想的位置。此外,传感器应能在静态和动态条件下工作,特别是运动器官,如心脏[7]。
同样,外科医生可能需要通过持续施加静态力来维持组织。这个静态力在维持期间需要是恒定的。同时,为了避免组织撕裂,力不能超过一个特定的范围。然而,由于组织的粘弹性,工具-组织相互作用力可能会随着时间的推移而减小(也称为应力松弛现象),导致组织滑移[8]。另一个例子是在磁共振成像(MRI)下进行手术,这种外科手术要求传感器具有磁共振兼容性。此外,在一些手术,如心血管微创手术中,传感器需要是电被动的,避免干扰的心脏的电活动[6]。
应用于MIS的触觉传感器主要是基于电学或光学原理开发的。图1显示了基于传感原理的MIS触觉传感器的种类。
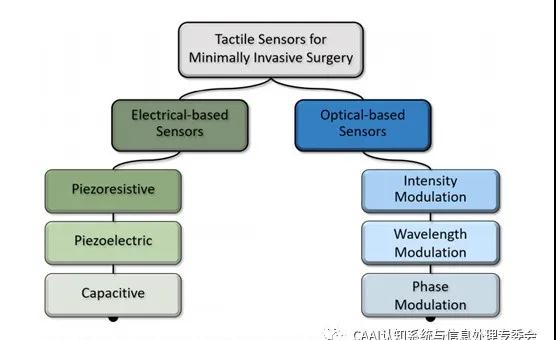
图1 触觉传感器分类
基于电子的触觉传感器是目前常用的MIS传感方式[6]。电子传感器可以进一步分类为压电式、压阻式和电容式传感器。虽然电子传感器满足了上面提到的大多数要求,但它既不与MRI兼容,也不是无源的。此外,压电式传感器不能测量静态力。G滞后和缺乏可重复性是这类传感器的另一个缺点。另一方面,基于光纤的传感器具有生物相容性、轻便性和耐腐蚀性。而且光学传感器是无源的,可在MRI环境下工作[9]。这导致光学传感器广泛应用于MIS和RMIS[6]。
光学传感器的工作主要基于三个原理:光强度调制(LIM),相位调制(PM) 和波长调制(WM)[6]。相比之下,基于LIM的传感器具有价格低廉、对热不敏感、设计简单、易于实现等独特优点,而基于PM和基于WM的传感器则需要一个相对昂贵的测量系统来计算力和位移等物理参数。基于LIM的传感器的缺点是,小型化仍然是限制其可扩展性的关键问题。这一限制在很大程度上影响了分辨率和测量范围[10],[11]。
在MIS应用中,触觉传感器的设计要求(又称约束条件)与传感器的物理和功能特性有关。物理特性主要取决于传感器的形状和大小,而功能约束则与传感器在生物环境中的兼容性、相互作用和性能有关。作为物理约束的一个例子,MIS触觉传感器应该是小尺寸和圆柱形的,可在导管的管身或尖端集成。作为功能要求,传感器应该能够测量0-5N范围内的接触力,分辨率为0.01N [12]。此外,传感器应相当敏感、线性、低滞后。
|
查看更多相似文章
|
 |
| 机器人招商 Disinfection Robot 机器人公司 机器人应用 智能医疗 物联网 机器人排名 机器人企业 机器人政策 教育机器人 迎宾机器人 机器人开发 独角兽 消毒机器人品牌 消毒机器人 合理用药 地图 |


