
中 |

人工智能的进步使机器人拥有越来越强大的社交能力,这些机器人表达了摩登7对改善日常生活的希望。然而,摩登7的期望与社交机器人现实之间仍然存在严重的落差。对人机交互中神经认知机制的理解有利于优化人机之间的社交接触。为了实现这一目标,该领域必须结合人类神经科学(包括便携式神经成像技术)以探究长期、具体的人机交互问题。发展社交机器人是未来的大趋势,而人类神经科学研究方式将帮助摩登7更友好地与社交机器人进行交互和协作。
目前社交已被视为机器人领域目前面临的十大挑战之一[1]。为了促进这一领域的进展,丰富的认知神经科学文献对人类社会行为提供了重要的见解[2]-[4]。
CellPress期刊近期发表的论文“Social Cognitionin the Age of Human–Robot Interaction”阐述,与机器人互动时研究人的大脑将有助于更清晰、更深入地了解人机交互,从而为社交机器人的春天奠定基础。关注这些交互作用的人为方面,包括考虑社会认知,这有助于突出人类神经科学在方法和理论上的最新进展,可以促进人与机器人流畅的交流。在考虑人机交互的神经认知机制时,摩登7建议关注社会认知的表现形式,以及这些表现形式在与实际存在的机器人进行持续交互过程中是如何变化的。此外,微创移动神经成像技术为加深对人机交互的人性方面的理解提供了特别的帮助。这些方法通过将社会维度整合到人与这些机器的交流中来加速人与机器人的交互研究,有助于推动创造真正的社交机器人。
1、在与机器人交互过程中人类大脑成像的起源
人们创造机械的起源可以追溯到上古时期,古希腊和中国古代的作家们发明了类人机器人来充当充当工人和仆人。在过去的一个世纪中,最能激发人类想象力(以及对研发投入)的自动机类型是机器人。与机器人技术的发展同步的是人脑成像技术的出现和快速发展。这项技术对于增进摩登7对支持人类社交行为的神经认知机制的理解至关重要。最近,人机交互和神经科学领域开始交叉,在与社交机器人交互过程中为社交认知提供了新的视野,有开创性的研究调查了对机器人的运动、动作观察以及注意力等。这些研究展示了所涉及的大脑成像方式的多样性以及早期人机交互研究中的技术进步,并为这些交互作用的神经认知观点提供了一个起点。
该领域的一项初步研究[5]探讨了动作观察网络(AON)的灵活性,得出的结论表明,该网络的顶叶,运动前和中颞叶皮质的部分对观察人类抓握和操纵物体都有反应。这些发现得到了脑电图(EEG)研究的证实,该研究表明无论是对机器人还是人类,其在感觉运动或AON区域都有抑制作用[6]。过去的脑成像研究表明,人类在观察机器人[7]表达情感以及机器人与其他人的互动时,确实表现出了人的感知网络(PPN)的参与。当观察人类和机器人在模拟疼痛时,或试图破译机器人[2]的意图时,可能会出现类似大脑的反应,这种情况仍然是一个活跃的研究领域。
2、最先进的人类神经科学方法研究人机交互
在将人类神经成像技术应用于研究人类与机器人在接近自然的社会互动环境中的互动方面,人类神经科学研究取得了重大进展。这些研究不仅进一步阐明了人类在感知和与机器人交互时社会认知的适应性和局限性,而且还阐明了机器人专家在研发越来越多的社交机器人时面临(并将继续面临)的一些挑战和机遇。
最近的两项功能性磁共振成像(FMRI)技术研究强调了将神经科学、机器人和现实世界的互动结合起来,共同推进社会认知和社交机器人学领域的发展。第一项研究为未来的社会神经科学研究铺平了道路,在测试大脑反应的同时,将社会互动与自主因素结合起来[8];另一项研究考察了长时间与一个手掌大小、爱玩耍的机器人科兹莫(Cozmo)进行社交的程度,这些人观察到同一个机器人“处于痛苦中”时,会产生共鸣反应。这项工作为研究与机器人的长期互动对社交神经认知过程的影响奠定了基础。
综上所述,目前神经科学对人机交互的研究结果强调了机器人是如何成为探测核心特征(动作、情感、意图)以及人类大脑中社会认知处理有用工具。虽然已经取得了重大进展,但在现场捕捉和表征大脑反应的方面,与机器人的持续互动仍处于非常早期的阶段。如后文所述,可能是未来探索和开发最富成果的领域之一。
摩登7应该如何探索人机交互的神经认知现实? 在感知或与机器人互动时,使用功能磁共振成像(FMRI)和脑电图(EEG)测得的神经反应,在不同的大脑网络中差异很大。一般来说,当人们观察社交机器人和其他人工智能体时,人类知觉网络(PPN)内的活动不会减少,而思想理论网络内的活动会减少。除了神经激活程度的差异外,未来在这一领域的研究将通过映射摩登7与机器人接触时的社会认知神经表征并描述这些表征随时间的变化。
许多研究人类如何感知机器人并与之交互的研究都集中在思想理论网络和PPN上。然而,新的证据表明,当摩登7与社交机器人互动时,包括下顶叶在内的其他大脑区域起着关键作用(图1)。
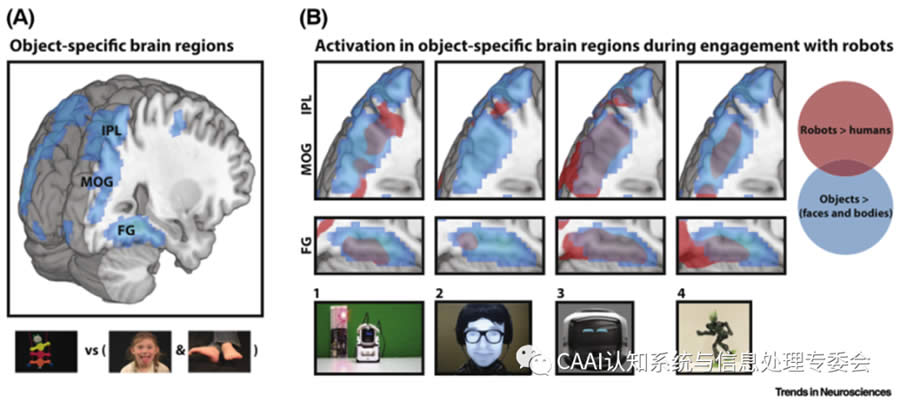
为了确定机器人在摩登7的社会环境中可能占据的位置,摩登7需要测量与有生命的对象(如人类或宠物)以及物体(如电话)之间的(不)相似性。这些问题的答案不仅会促进摩登7对人们如何看待社交机器人发展的理解,而且还涉及到哲学、认知科学和法律,它们对整个社会都有重要的影响(如道德和伦理)。
3、了解与社交机器人的真实互动
基于屏幕的实验、第三人称观察以及与机器人的一次性或短期互动,已经提供了与这些新型智能体接触的社会认知过程的关键见解。为了让这个领域向前发展,未来的研究应该研究在生态环境中与机器人的真实和长期的互动。这些研究将为探索人类大脑如何在现实世界中与这些物体进行相互作用提供非常必要的依据。
总体而言,社会神经科学领域仍然需要考虑第二个人在互动中的重要性[9]。这个挑战对于研究摩登7与社交机器人的互动尤为重要。幸运的是,已经有数项研究开始关注机器人(或与之交互)的影响,这些影响涵盖了更广泛的机器人设计和形态[10][11]。通过整合从行为(例如,言语和眼睛注视)和生理学(例如,呼吸和神经活动)获得的信息,开始探索人机交互的神经认知方面[12][13]。
在社会认知的背景下,当与机器人互动时,需要考虑的是机器人的目标群体,以及这些互动的目的。社交机器人的两个主要目标人群是儿童和老年人,而神经科学和心理学的参与者样本主要是年轻人,并且往往偏向于社会的特定部分(例如,受过教育和较高的社会经济地位)。
4、移动脑成像技术在人机交互研究中的应用前景与误区
移动神经成像技术的新发展为机器人如何在社会层面产生共鸣提供了必要的测试基础。研究人机交互的一种有前景的技术是功能性近红外光谱(fNIRS)。从最初建立人脑功能和相应的光吸收之间的联系以来,该技术一直在稳步发展[14]。这种成像方式,就像功能磁共振成像一样,利用近红外光谱中生物组织(如皮肤和骨骼)的透明性,绘制了依赖于血氧水平的反应图[15]。激光二极管或发光二极管照射在头部的光线穿过头盖骨,以香蕉形状的曲线散射回来,最终被一个距离头部约3厘米的探测器探测到。fNIRS的局限性与其相对较浅的穿透深度(到达大脑皮层外层)和相对较低的空间分辨率(2-3cm)和时间分辨率(高达10hz)有关。它比功能磁共振具有更低的空间分辨率和比脑电图成像慢的时间分辨率,但具有成本低、便携性好和相对稳定的优点。
这些优势使移动式和无障碍的神经成像成为可能,因此fNIRS被认为是进行具体的人机机器人实验的最佳侯选,特别是对于代表性不足的群体,例如儿童,患者和老年人,他们通常无法参与数据采集。人机交互研究人员已经将fNIRS作为构建反馈回路以控制机器人运动或行为的工具,并将其作为对各种机器人系统的隐式响应评估[16]-[18]。
从使用基于屏幕的社交机器人评估的实验,到使用fNIRS测量与实体机器人的无限制真实世界交互,应该是一个渐进的过程,逐步增加复杂性(图2)。
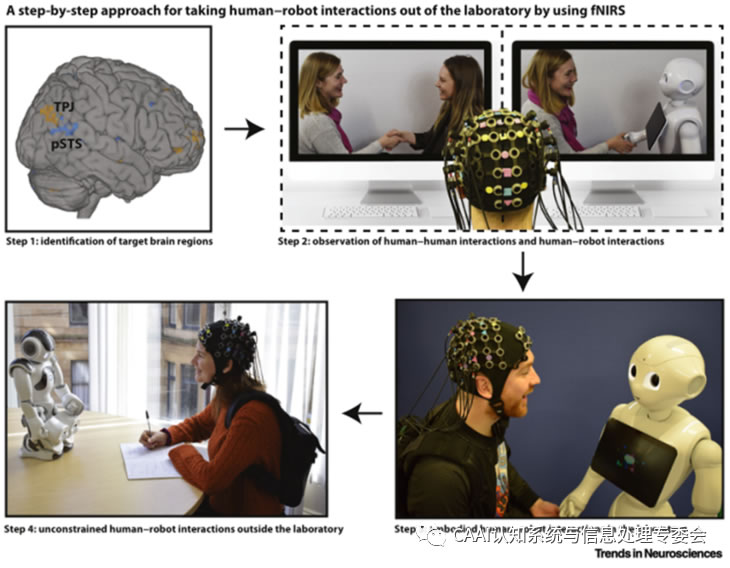
在现实世界中,可以采用逐步的方法来实现实验室之外的不受约束的人机交互。第一步是识别与社会认知过程相关的大脑区域,如之前的发现;随后,基于屏幕的研究探索了这些区域在观察人人和人机交互过程中的参与情况;第三步是在实验室环境中与机器人进行相对不受约束的交互;最后一步是允许在日常环境(如学校和家庭)中与机器人进行具体交互。每一步的结果都可以为下一步使用的方法和分析提供信息。
5、结束语
以神经科学为基础的人机交互在改变社交机器人技术领域取得了重要进展,同时也加深了摩登7对人脑的理解。除了在基于屏幕的实验中感知机器人外,最近的研究发现在与机器人的实时、具体交互中采用更复杂的分析方法,可以帮助摩登7对社会认知的核心机制进行更深入的了解。基础人类神经科学研究的另一个好处是,它也将为下一代社交机器人的开发和设计提供信息,这些机器人最终可能成为提供支持和护理的社交伙伴。然而,神经科学对人机交互的贡献仅十多年,目前还存在一些问题,例如:(1)人脑复杂的神经机制如何支持摩登7与这些的奇怪机械同伴的互动?(2)随着机器人越来越深入地融入摩登7的社会生活,社会认知的表现如何随着时间的推移而改变?结合人类神经科学和社交机器人学的未来研究成果,将为未来与在社会层面和摩登7产生共鸣的自主机器人一起生活做好准备。
| 资料获取 | |
| 新闻资讯 | |
| == 资讯 == | |
| » 人形机器人未来3-5年能够实现产业化的方 | |
| » 导诊服务机器人上岗门诊大厅 助力医院智慧 | |
| » 山东省青岛市政府办公厅发布《数字青岛20 | |
| » 关于印发《青海省支持大数据产业发展政策措 | |
| » 全屋无主灯智能化规范 | |
| » 微波雷达传感技术室内照明应用规范 | |
| » 人工智能研发运营体系(ML0ps)实践指 | |
| » 四驱四转移动机器人运动模型及应用分析 | |
| » 国内细分赛道企业在 AIGC 各应用场景 | |
| » 国内科技大厂布局生成式 AI,未来有望借 | |
| » AIGC领域相关初创公司及业务场景梳理 | |
| » ChatGPT 以 GPT+RLHF 模 | |
| » AIGC提升文字 图片渗透率,视频 直播 | |
| » AI商业化空间前景广阔应用场景丰富 | |
| » AI 内容创作成本大幅降低且耗时更短 优 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|
 |
| 消毒机器人排名 移动消毒机器人 导览机器人 |
